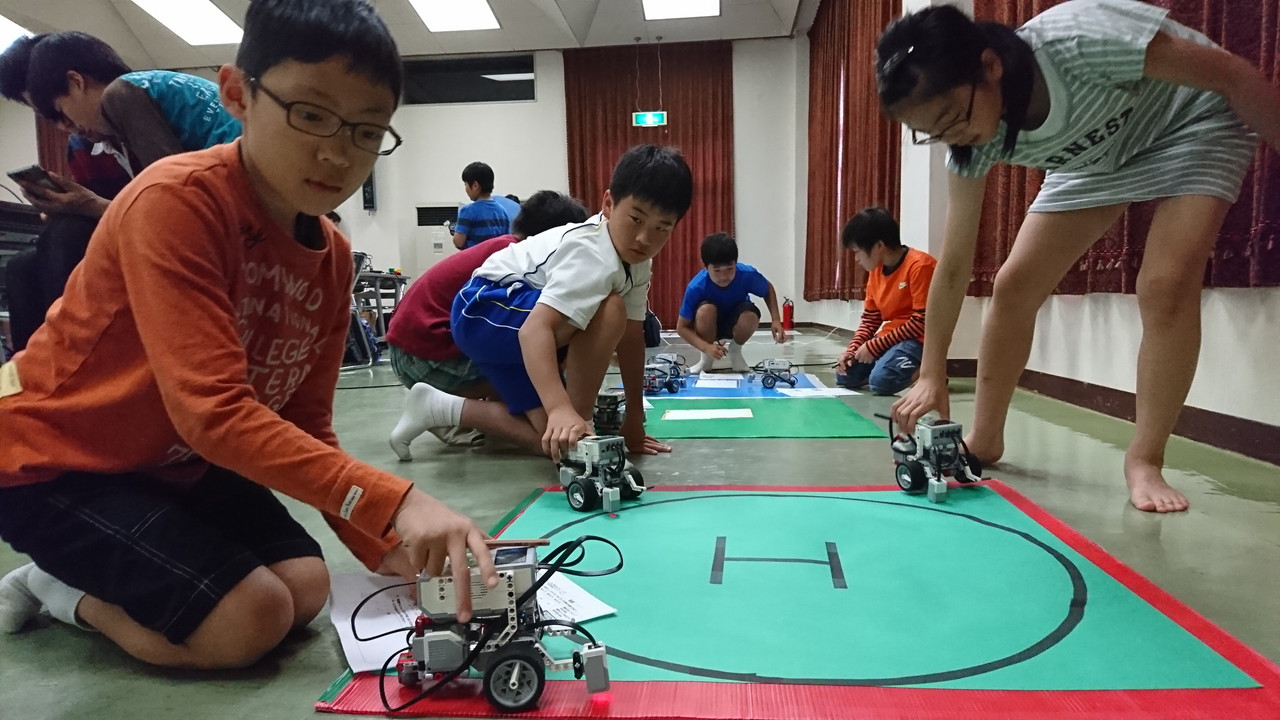
前回でロボットを組み立て、モーターを使いこなして前後左右に自由に動かすことに挑戦しました。
今回は光センサーを使っていろいろな色のものを計測し、白と黒の反射光の違いを使って黒線をたどるロボット「ライントレーサー」のプログラミングに挑戦しました。
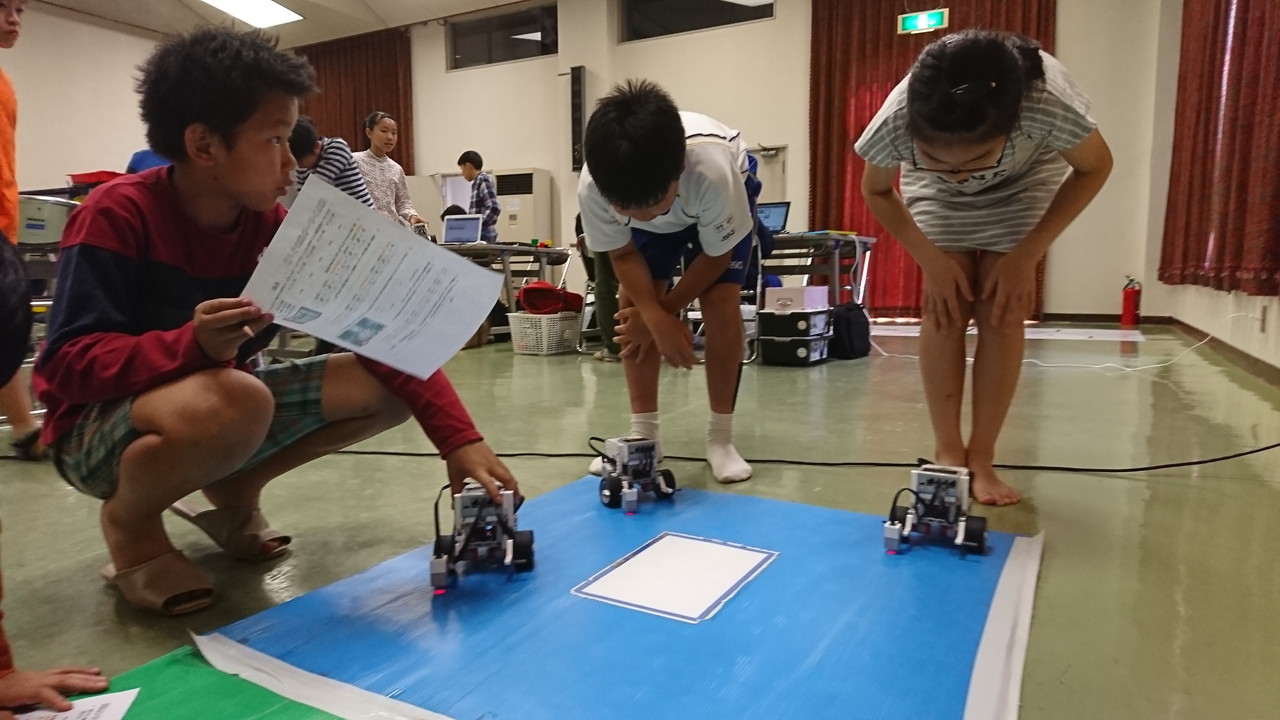
テキストに不備があり、ちょっと混乱させてしまいましたが、試行錯誤することで理解が深まります。
ぜひ、このモヤモヤを家庭での学習で解消しておいてくださいね。
子供たちの相談に乗ってくださった保護者のみなさん!ありがとうございました!
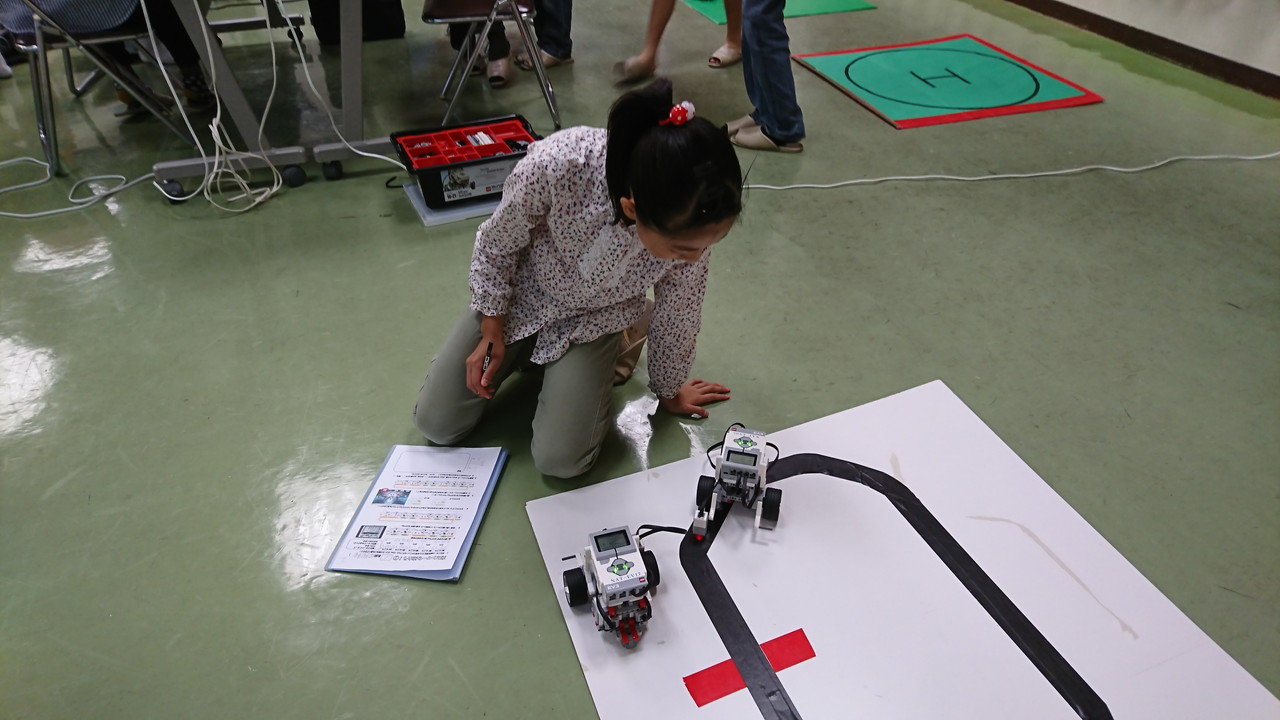




両側トレースの作例はこちら。
w-side

Programming education for all children
こちらを表示中:
