
前回の講習会で、私の実験ではうまく行ったプログラムが子供たちのロボットではうまく動作しませんでした。
原因はセンサーの品質にばらつきとロボットの個体差と考えられますが、コースの素材や照明の位置によって動きが全く別物になることもよくある話です。
ここは対応力向上のためのトレーニングと思って、様々なライントレースの方法について研究しておきたいと思います。
今回の小学生競技では、ライントレースの目安となる黒線、その周りの白エリア、さらにその外側に濃い緑色のエリアがあります。
Ev3カラーセンサーにはカラーモード(白LED)と反射モード(赤LED)、そして周辺光モード(消灯)の3つのモードがありますが、特にカラーモードのバラつきが激しく、反射モードは緑色と黒の見分けがほとんどつきません。白の周りに濃い緑を配置しているのは実は巧妙な罠なのであります。
まずは光センサーのモードを切り替える練習として、反射モードでライントレースし、カラーモードで曲がり角を判定するロボットです。
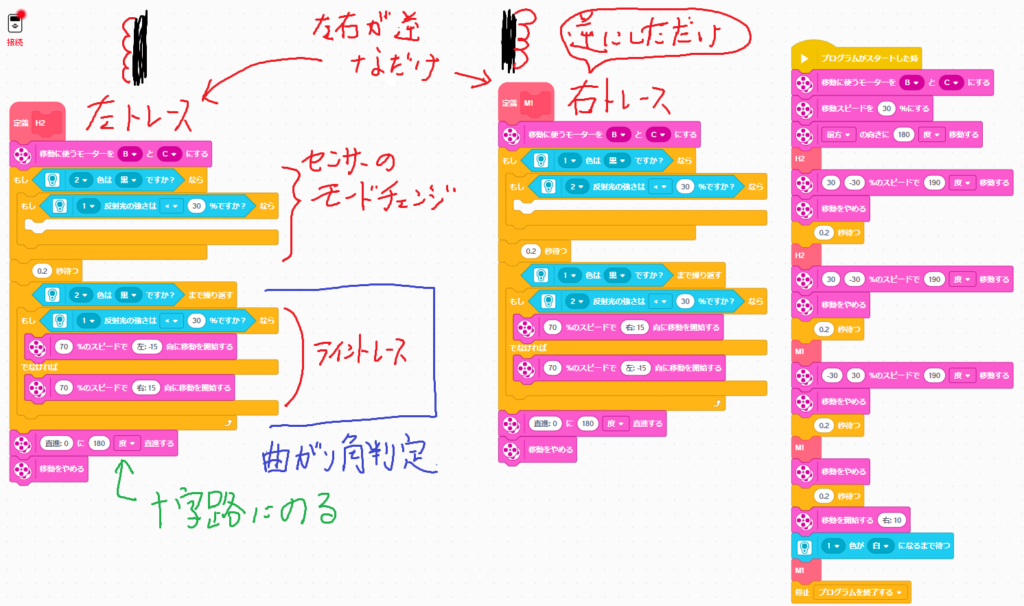
マイブロックは2つ。
左トレース用のH2と右トレース用のM1です。
H2は光センサーのカラーモードを切り替えた後、2番のセンサーが黒になるまで、1番のセンサーが明るい時は左、暗い時は右に湾曲するように走ります。これによって線をたどるように走ります。
M1はH2の真逆にしてあります。
ライントレースが失敗するときは、これにチャレンジしてみてください。
