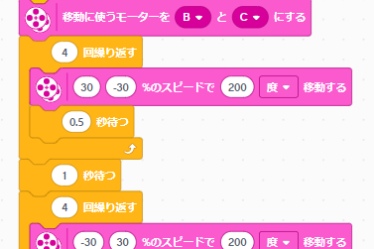
黒線を使って、滑らかにロボットの向きをそろえ、まっすぐ進んでオブジェクト(電球)の色を読み取り、その色を言わせてみましょう。

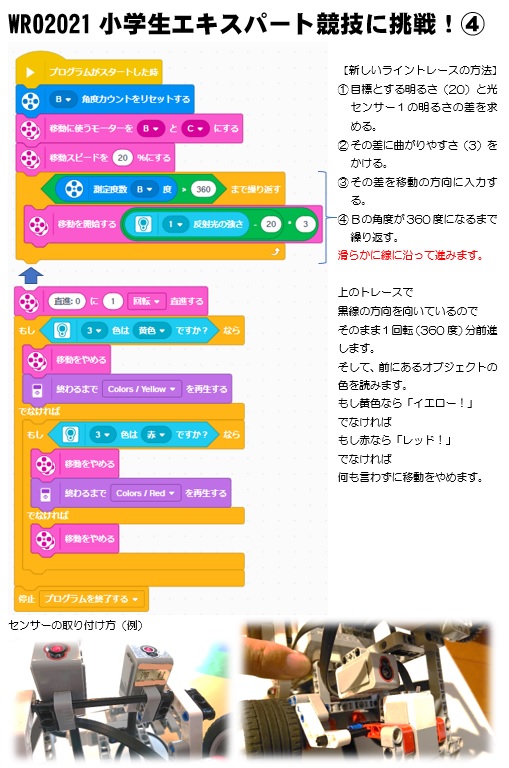
①目標とする明るさ(20)と光センサー1の明るさの差を求める。
②その差に曲がりやすさ(3)をかける。
③その差を移動の方向に入力する。
④Bの角度が360度になるまで繰り返す。
すると、これだけで滑らかに線に沿って進みます。
このとき、想定される差と曲がりやすさをかけた値が-100~+100の間になるようにおさめないと
逆走など、予想外の動きをするようになってしまいます。

黒線の方向を向いているので
そのまま1回転(360度)分前進します。
そして、前にあるオブジェクトの色を読みます。
もし黄色なら「イエロー!」
でなければ
もし赤なら「レッド!」
でなければ
何も言わずに移動をやめます。