
高岡市ロボットプログラミング競技大会向けに、カラーセンサーを2つ使った速いライントレースのプログラムを考えました。
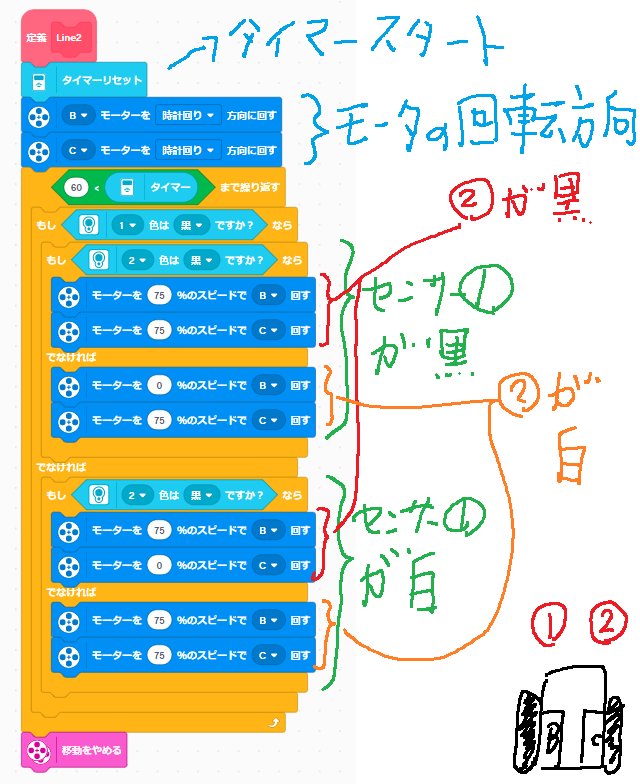
マイブロックLine2は、60秒間で停止するプログラムです。
まずタイマーをリセットし、モーターの回転方向を前進方向に設定します。
次に、60秒間だけ繰り返すループの中に、ライントレースの動きをプログラムしました。
最初にセンサー①をチェックします。
センサー①が黒ならすぐ下の中身を実行します。
その中身は、センサー②をチェックして黒なら、①も②も黒なので、十字路に来ていると考えられます。モーターBもCも75%で直進します。黒でなければ、黒線にかかった方のモーターを止めて、左方向に曲がります。
センサー①が黒じゃない場合は、「でなければ」の中身を実行します。
さっきと同じように、センサー②をチェックして、黒なら先ほどとは逆に①が白、②だけが黒なので、Cモーターを止めます。センサー②も黒でないなら、両方とも黒線にかかっていないので、BC両方のモーターを前進させて直進します。
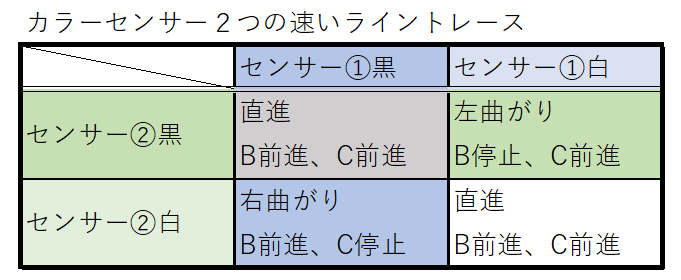
つまり以下の表のようになります。
あとは、できるだけスピードが上がるように、モーターのパワーを上げて調整していきます。
カーブに合わせて、なるべく引っかからないで走れるようにすると好タイムがねらえます。
十字路を境に間借り具合を変えたライントレースを切り替えるようなプログラムを組むと1分間で8周を超えるような高速ロボットが作れる可能性もあります。
がんばってください。

[…] 今回は、光センサーを2つ使った高速ライントレースのプログラムと、マイブロックの紹介を行いました。マイブロックのプログラムは、NATのGoogleDriveで共有します。 […]