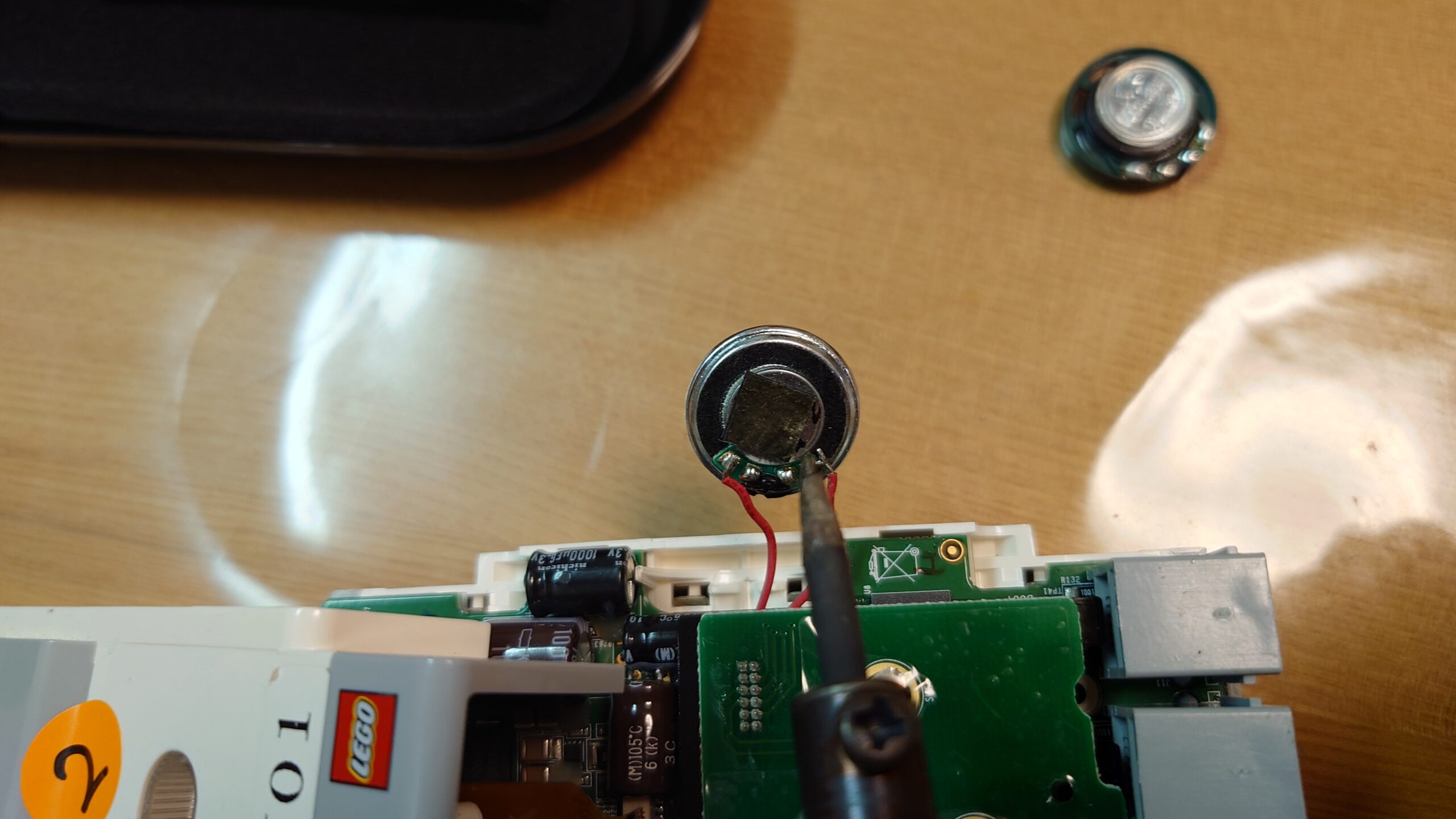
資料【修理】Ev3のスピーカーを交換する Ev3もだいぶガタが来ていて、スピーカーの鳴らないものが出てきました。 スイッチ操作やプログラムの転送完了等を … 2025年11月16日2025年11月16日
PythonPythonでジャイロターン 塩谷和紀くんの作例その2です。 〔ジャイロのプログラム〕 このプログラムはジャイロセンサーのヨー角を使って曲が … 2025年10月24日2025年10月26日
PythonPythonで加速減速ライントレース 本講習会を受講している中学生の塩谷和紀さんがプログラムの作例を書いてくれました。以下で紹介します。 ===== … 2025年10月24日2025年10月26日
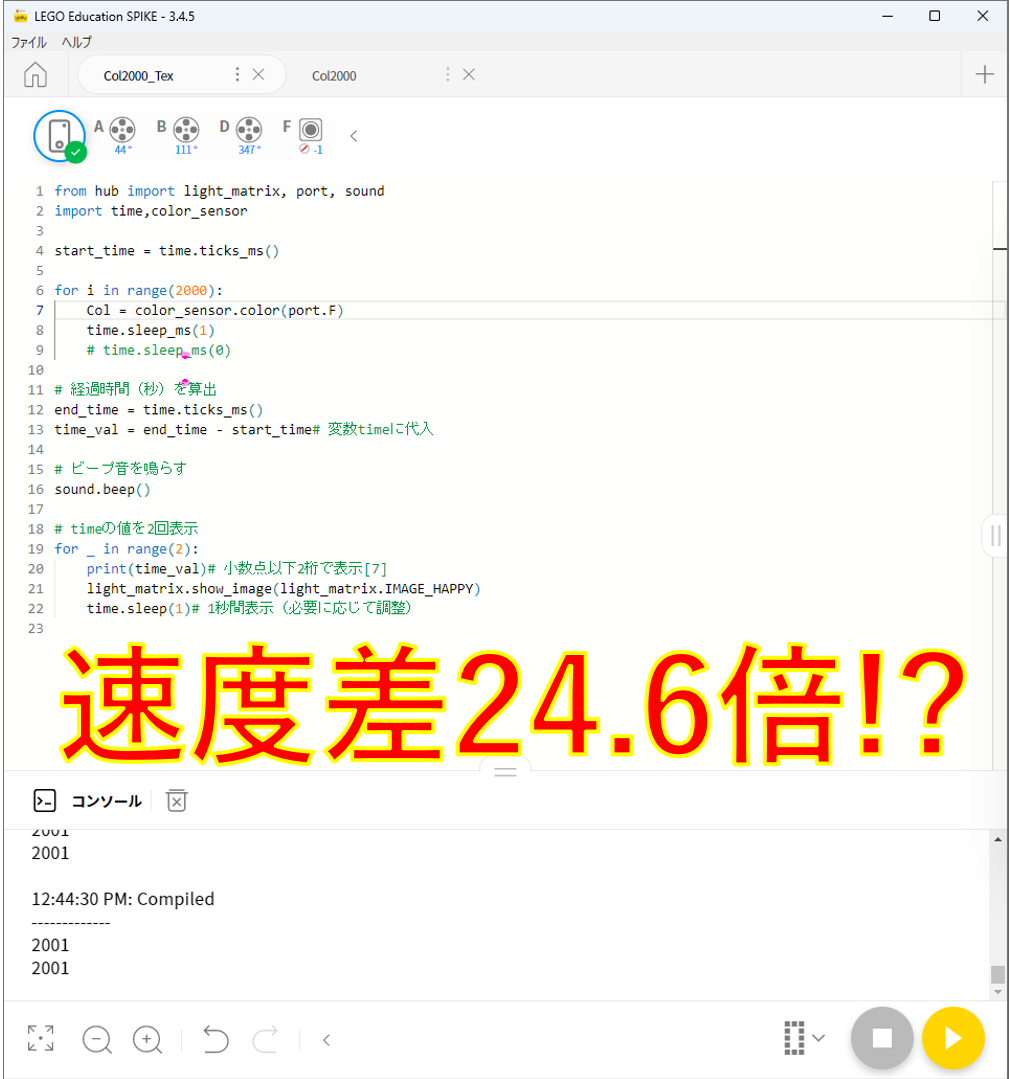
資料【WRO攻略】ワードブロック VS Python 「Pythonでロボットプログラミング競技に参加していました!」って言えた方が、「スクラッチっぽいブロックでプ … 2025年9月14日2025年9月20日
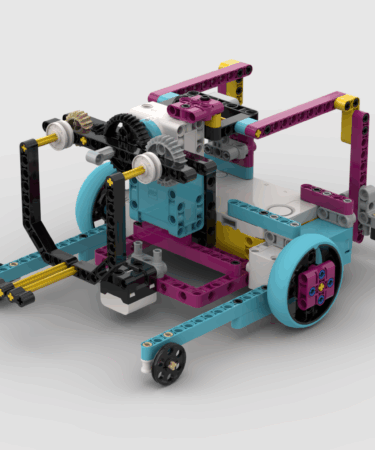






お掃除ロボット対決.jpg)