前回公開したハエたたき1号では、実際にはオブジェクトを安定して運ぶことができませんでした。
アームがゆらゆら動くと、その反動でロボットが揺さぶられてしまうのですね。
何事もやってみないと分からないものです。
そこで、モーターにつながらない方も固定してやることで安定して運べるようになったので、改良機体を公開します。
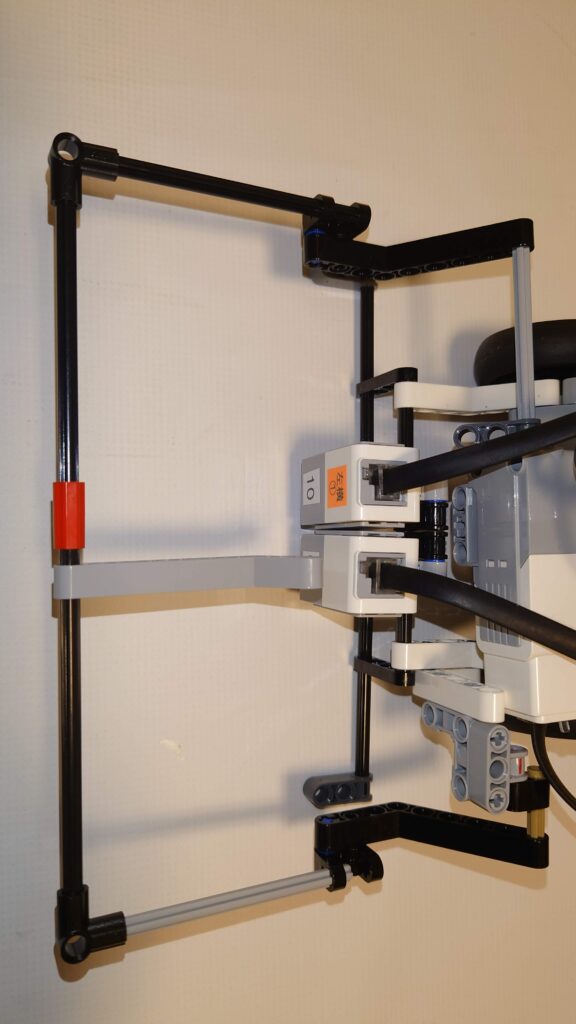
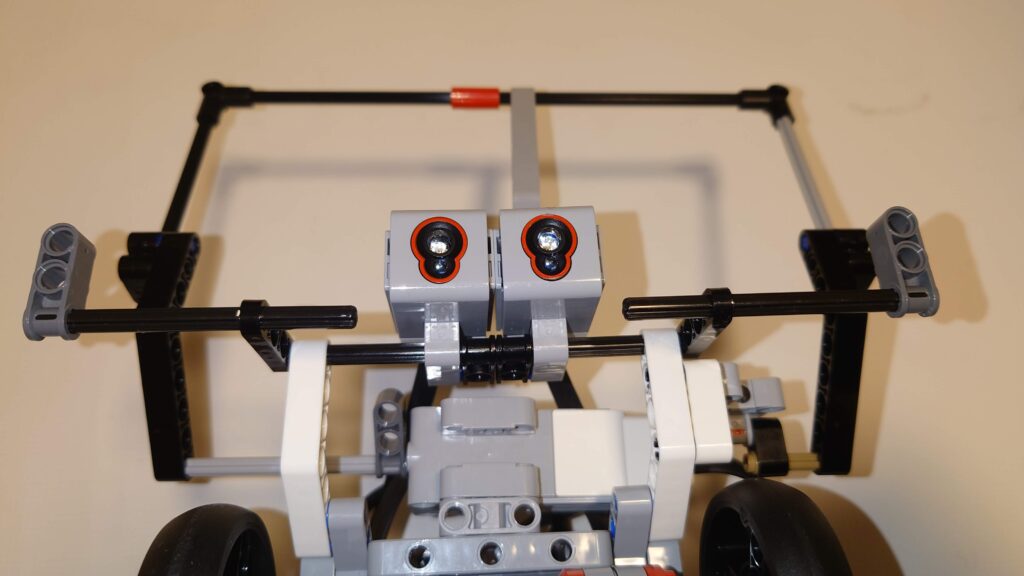
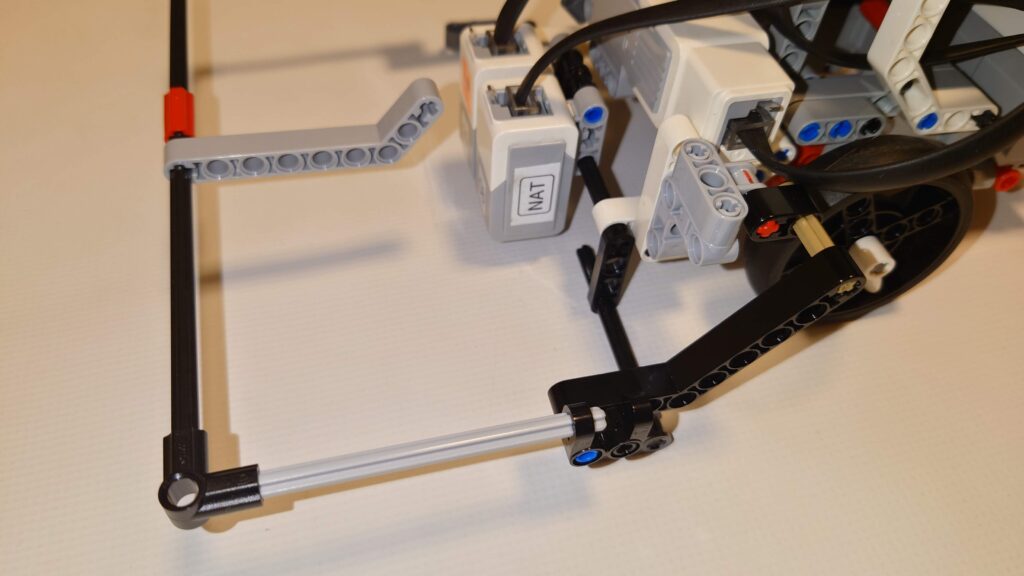
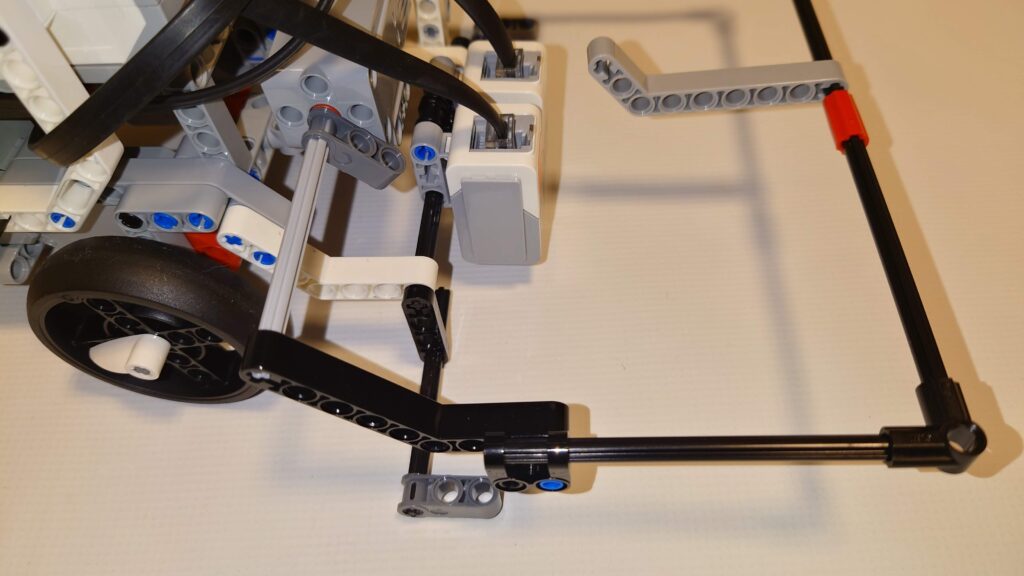
相変わらずシンプルです。っていうか基本セットしか使わないので、ごちゃごちゃできないのです。
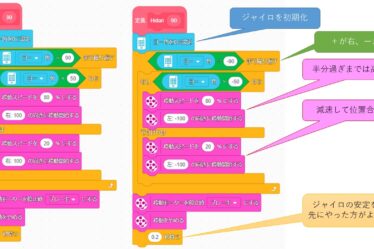
そしてプログラムも公開しちゃう。イヨっ!太っ腹!
https://drive.google.com/file/d/12lg3-bDMIdJF2e2d2MrWj_qvUZRmzwhS/view?usp=sharing
↑ GoogleDrive直リンクです。EV3クラスルーム用。
テキストはこんな感じ。
ここまで来た人はこの程度のプログラムは読めるでしょうから、詳しい説明は省きます。
とっても簡単な組み合わせしかしていませんよ。