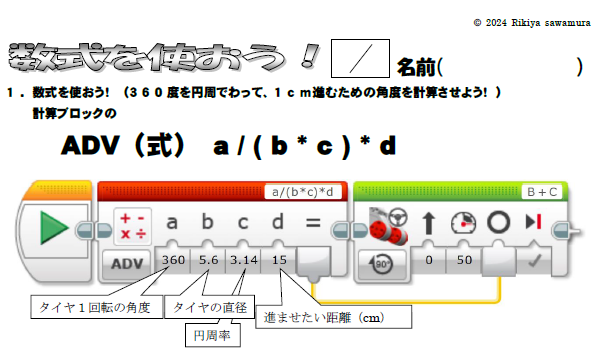
タイヤ1周の角度360度をタイヤの円周でわることで1cmあたりの角度を出すことができます。
それに進ませたい距離(cm)をかけることで角度を意識することなくロボットを直進させるプログラムを書くことができます。
2024/6/11 テキストの一部に間違いが見つかったため修正しました。

Programming education for all children
Programming education for all children
タイヤ1周の角度360度をタイヤの円周でわることで1cmあたりの角度を出すことができます。
それに進ませたい距離(cm)をかけることで角度を意識することなくロボットを直進させるプログラムを書くことができます。
2024/6/11 テキストの一部に間違いが見つかったため修正しました。