黒線をたどってライントレース-375x450.jpg)
体力測定バナー-375x450.jpg)
壁あてまっすぐ押し出しフレーム-375x450.jpg)
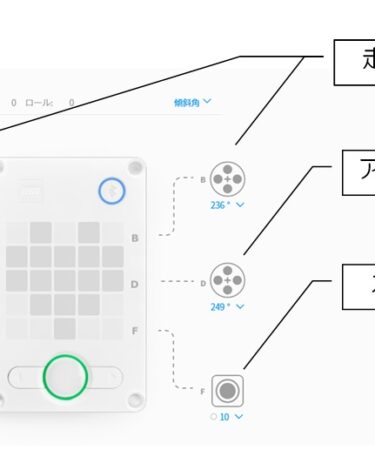
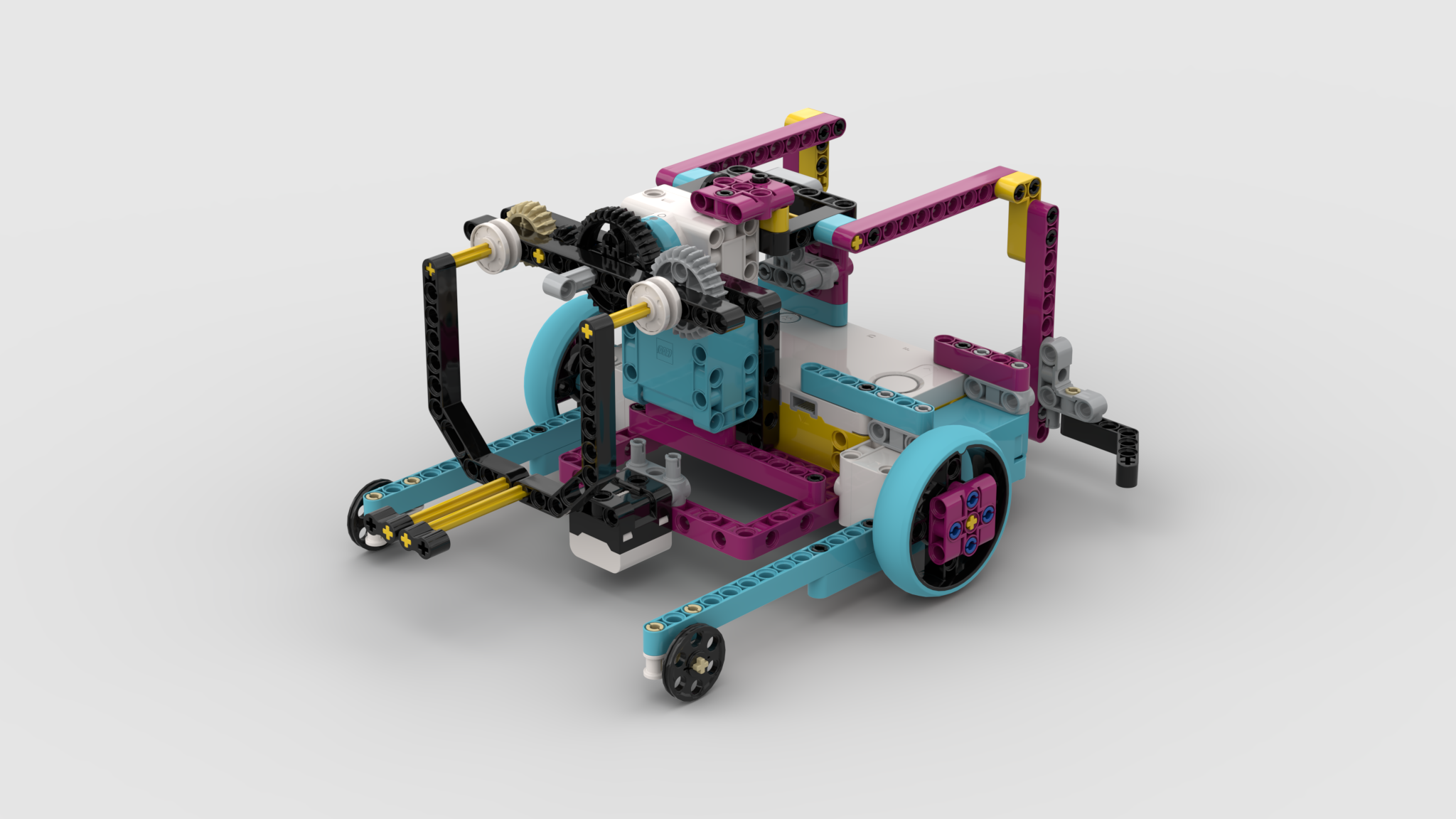
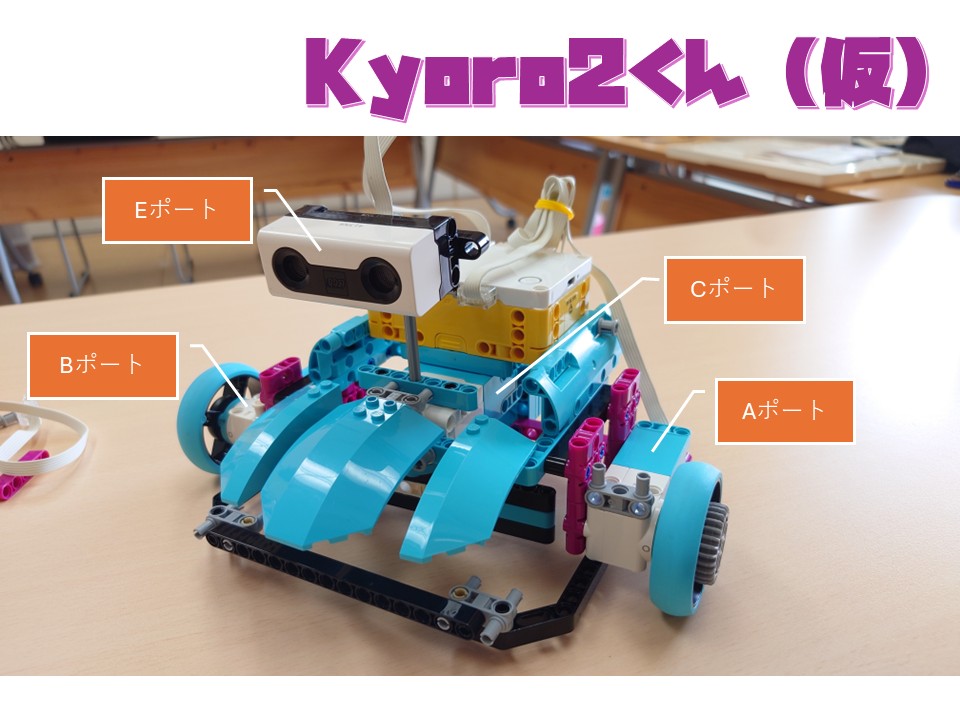
2月7日からの講習会で使用する素体ロボットのテキストができました。 ひとつのLモーターで、オブジェクトを挟んで …
WRO2026 Robomission 日本最速適当翻訳!
もはや恒例行事となりましたこの企画。 えぇ!今年もやりますとも! 元のサイトはこちら↓ 2026 Season …

Programming education for all children
Programming education for all children
もはや恒例行事となりましたこの企画。 えぇ!今年もやりますとも! 元のサイトはこちら↓ 2026 Season …