SpikePrimeは好景気にも拘らずEv3に比べてセンサーポートがひとつ少なくなっており、ポートひとつの重要性が増しております。
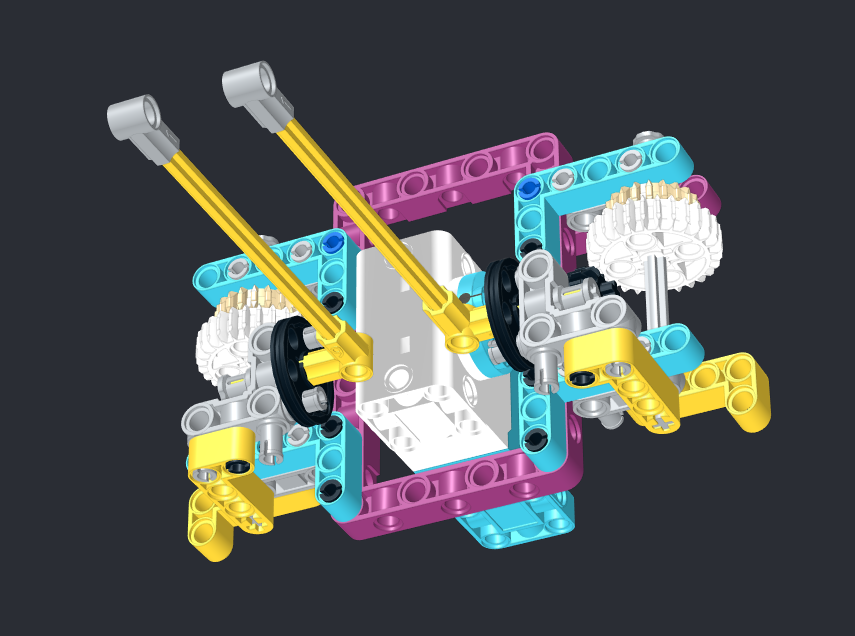
ひとつのモーターでつかんで持ち上げることができるリフトアームは、オブジェクトの摩擦による不確定要素をなくすことができるので、WRO等のロボット競技では必須の技術であり、身に付けておくべき技術です。
これまでのRISからEv3までのキットでは、基本セットでつかんで持ち上げるアームを作るのが難しかったので講習会では使ってきませんでしたが、SpikePrimeで挑戦したところ、なんとか実用性のあるものができましたのでここに公開したいと思います。
ぜひ、これを参考にみなさんも自分のリフトアームを工夫してみてください。
コツは、つかむ法の動作を先にしてしまう方がよいので、つかむアームを回転させる歯車を大きいものにしておくことです。大きい歯車は動かすための力が少なくて済むのでつかんでアームが止まった後で持ち上げ動作に入ります。逆だと、先にアームが上がってしまい、オブジェクトの上で合掌するおバカなロボットができてしまうので気を付けましょう。
と言っても、自分で作ってみるまでは分からないと思います。
理解するためにはまず自分で作って動きを確かめ、いろいろ作り変えてみることです。
やってみなけりゃ分からない。
Let’s Learning by doing!
です。
作り方テキスト
作り方動画(テンション上がるのでぜひ)