前期第5回は里山交流会館で行う最後の講習会でした。 子供たちのロボットにもずいぶん差が出てきました。みんなそれ …

WRO2025メモ 国際ルール適当翻訳
ちょこっと確認したいときのための資料置き場です。 それにしてもGoogle様はすごいなぁ!
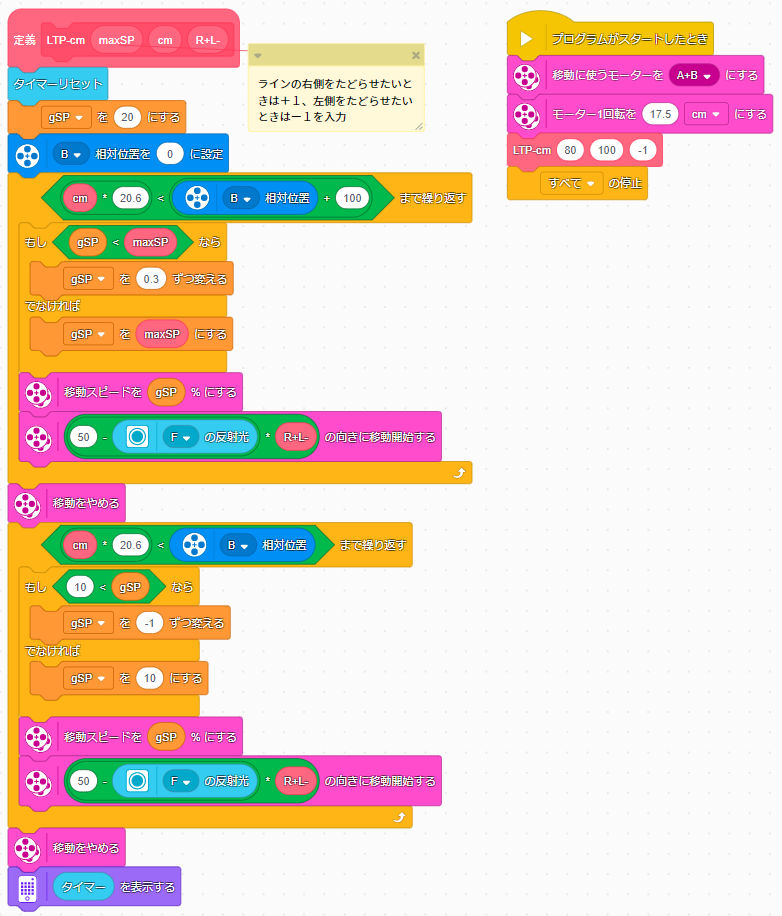
WRO2025攻略 5)誤差を補正する
昨日のWRO2025富山予選会試走会では、自宅と全く動きが異なることに悩む子どもたちの声があちこちで聞かれまし …

Programming education for all children
Programming education for all children
ちょこっと確認したいときのための資料置き場です。 それにしてもGoogle様はすごいなぁ!
昨日のWRO2025富山予選会試走会では、自宅と全く動きが異なることに悩む子どもたちの声があちこちで聞かれまし …

色によって動きを変えよう!.png)