
新型コロナの感染拡大が止まらず、次回の講習会開催にも暗雲が立ち込めています。
先週に続き、今週もオンラインで練習会を開催しました。

子供たちからは2つの質問が寄せられました。
1 壁に乗り上げない工夫 →タイヤが壁に当たらないようにバンパーを付ける。
2 障害物を乗り越えつつ、素早く曲がる車体の作り方 →4つのタイヤにゴムを付けると曲がりにくくなる。後輪はゴムタイヤを付けない。
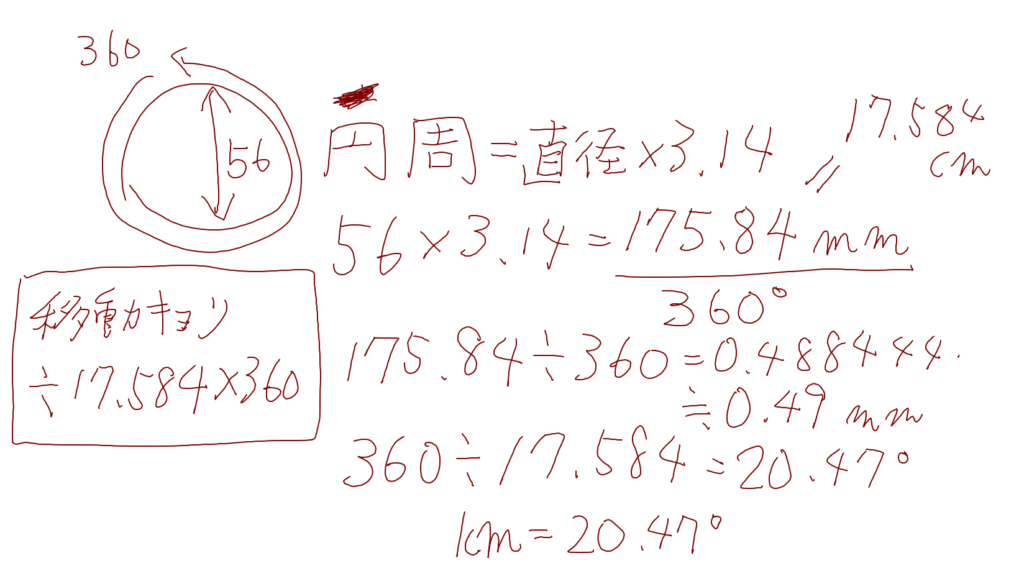
それから今回は、タイヤの大きさから1cm進むのに必要な回転角度を計算しました。Ev3付属のタイヤでは1cm進むのに20.47度が算出できました。勘に頼らず、計算で論理的にプログラミングすると、調整も楽になります。
講師もマイブロックの研究に取り組みました。
その悪戦苦闘の成果は以下のリンクをご確認ください。
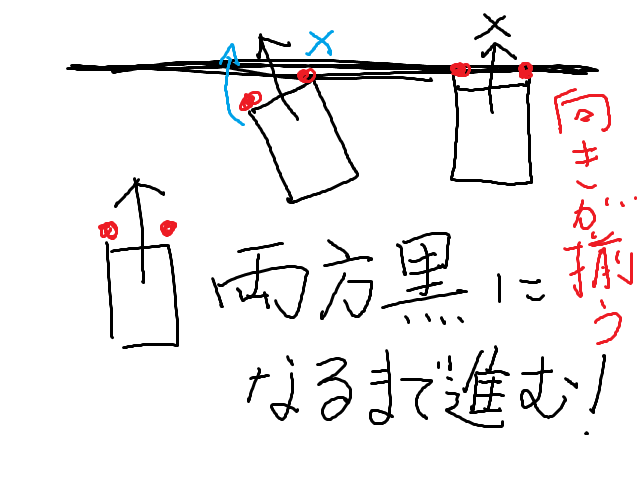
黒い線を見つけて止まる
いやはや、突き詰めるとなかなかうまくいかないものですねぇ。特にEv3はセンサーの個体差によるバラつきが大きいので大変です。
まだまだ、勉強が必要ですね。