全部つなげよう!-375x450.jpg)


オブジェクトの色によって動きを変える.jpg)
WROではオブジェクトの色によって動きを変えなければいけない課題がたくさんあります。環境や位置関係によって1度 …


なめらかライントレース(マイブロックcm)バナー.jpg)
黒線をたどってライントレース.jpg)
体力測定バナー.jpg)
壁あてまっすぐ押し出しフレーム.jpg)
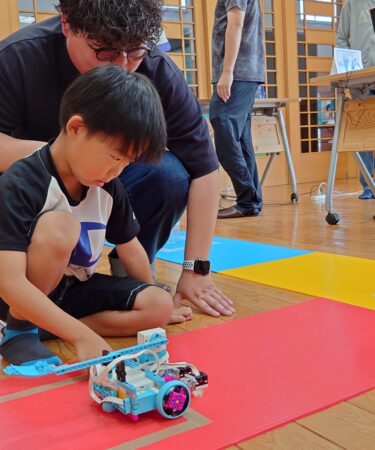
令和7年度高岡市ロボットプログラミング競技大会
3月20日9時30分より伏木コミュニティセンターにて高岡市ロボットプログラミング競技大会が開催されました。ただ …

Programming education for all children
Programming education for all children
3月20日9時30分より伏木コミュニティセンターにて高岡市ロボットプログラミング競技大会が開催されました。ただ …