
壁あてまっすぐ押し出しフレーム.jpg)
さて、2026年度の攻略記事が始まります。
まずは、センサー等を使わない距離と角度のみで動く部分に取り組んでみましょう。
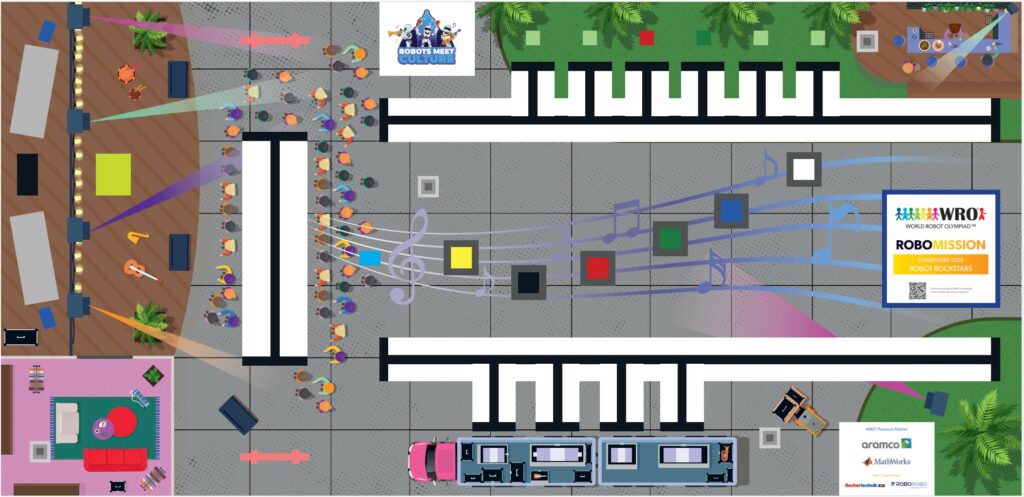
上記コース下部のピンク色のトラックに楽器類が積み込まれていて、それを奥のバックヤードに押し込まなければなりません。
単純に押し込もうとすると、楽器オブジェクトが床との摩擦でランダムに動き、ロボットがまっすぐ進んでくれません。そこで機体の左先端に丈夫なフレームを組み、プーリーで壁際をガイドしながら進むようにしてみました。
そのための設計図がこちらです。前回UPしたものを実際に走らせたところ、様々な不具合がありましたので、そちらもいろいろ解消済みです。オブジェクトの色読み用センサーを付ける以外は、これで攻略可能だと考えています。
実際の動きはこちらです。
強引だけど、ちゃんとできるようになりました!

[…] ロボット(Clipper-01-Wall)ができたら、ちゃんと動くかどうか確認してみましょう! […]