次は、両方とも反射モードを使ったロボットです。
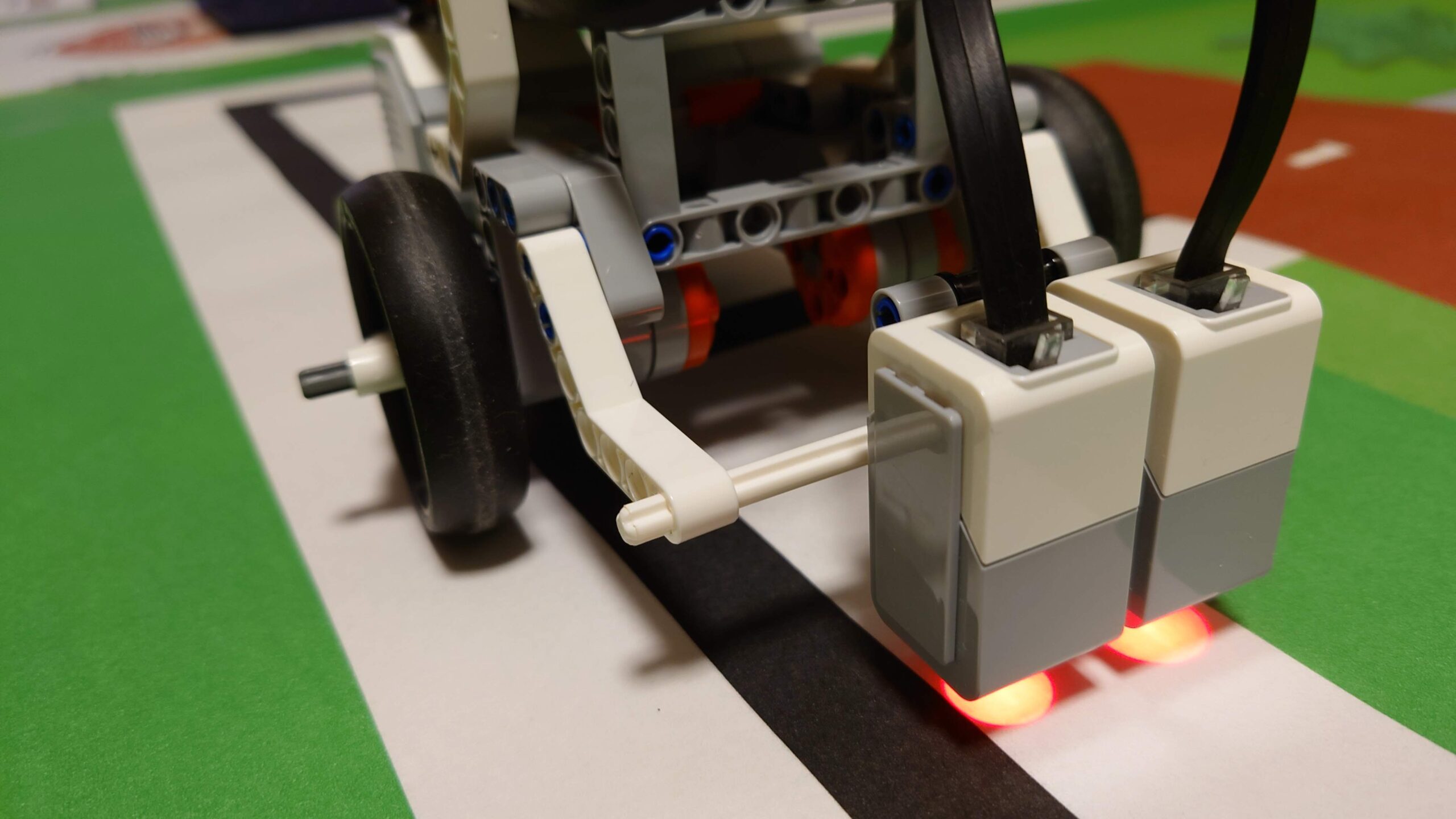
反射モードでは黒と緑を見分けることが難しくなるため、2つのセンサーを近づけました。
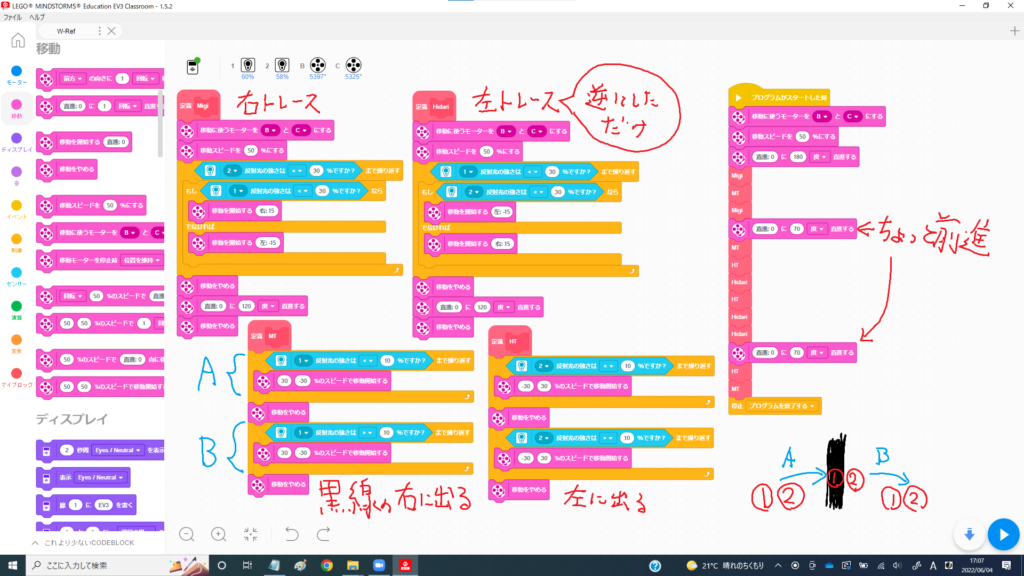
カラーモードを切り替えないので、その作業が要りません。
センサーの取り付け位置が黒線をまたがないため、黒線とトレースする場所と車体位置の調整に少し工夫が必要です。
ちょっと待てよ?
よく考えたら、黒と緑を判別できないなら、緑をたどっちゃえばいいんじゃない?(覚醒!)
以下、また今度。

Programming education for all children
Programming education for all children
次は、両方とも反射モードを使ったロボットです。
反射モードでは黒と緑を見分けることが難しくなるため、2つのセンサーを近づけました。
カラーモードを切り替えないので、その作業が要りません。
センサーの取り付け位置が黒線をまたがないため、黒線とトレースする場所と車体位置の調整に少し工夫が必要です。
ちょっと待てよ?
よく考えたら、黒と緑を判別できないなら、緑をたどっちゃえばいいんじゃない?(覚醒!)
以下、また今度。