
だんだんプログラムが大きくなってきました。
ちゃんと動く部分をマイブロックにして繰り返し使えるようにストックしてきたのですが、競技も後半になると実行部分が肥大化してきて、実験するのも大変になります。
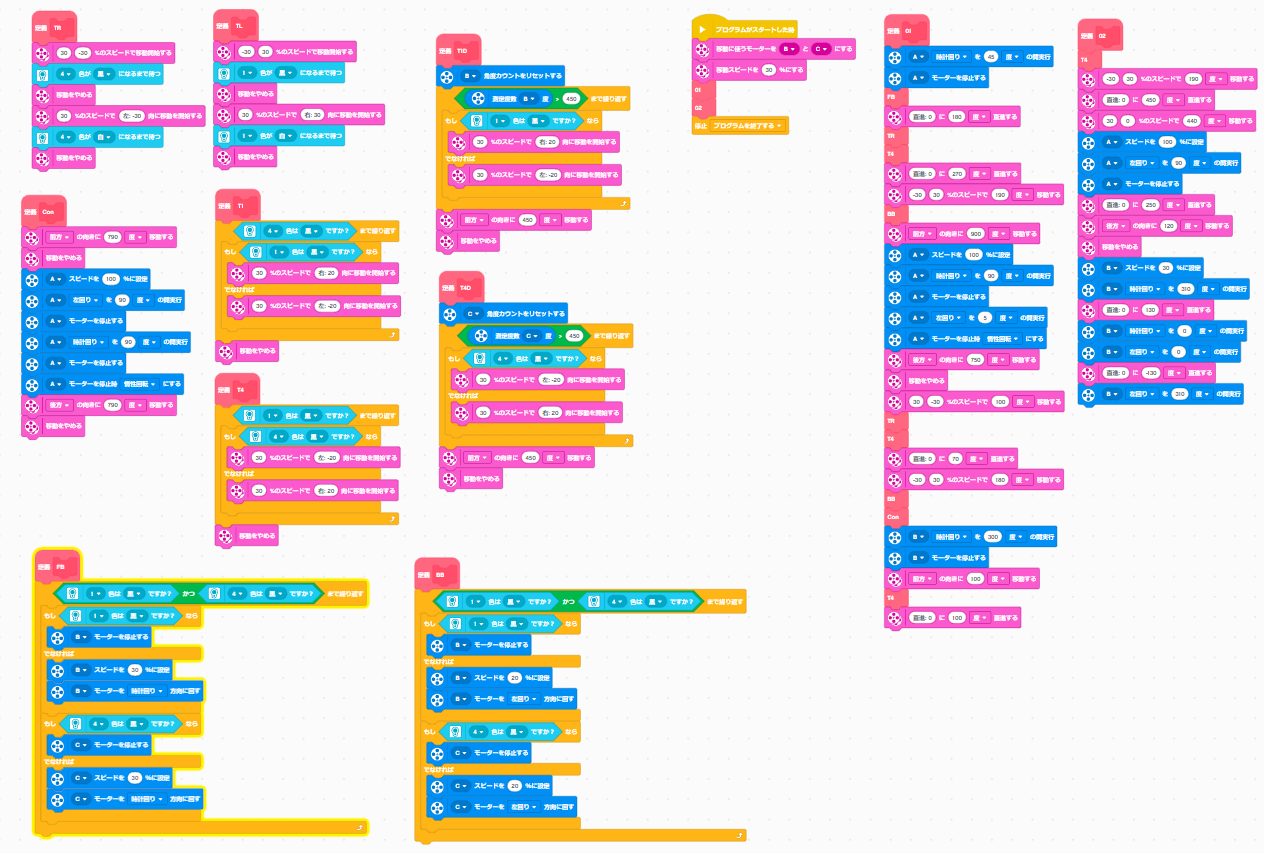
そんなときには、完成した部分をマイブロックにしてまとめ、一旦取り外すと練習したいところだけを取り出して繰り返せるので便利です。
チームで練習するときも、同じプログラムを共有して、部分ごとに分担して開発すると効率的ですよ。
そして、それを一旦取り外して横に置いておきます。
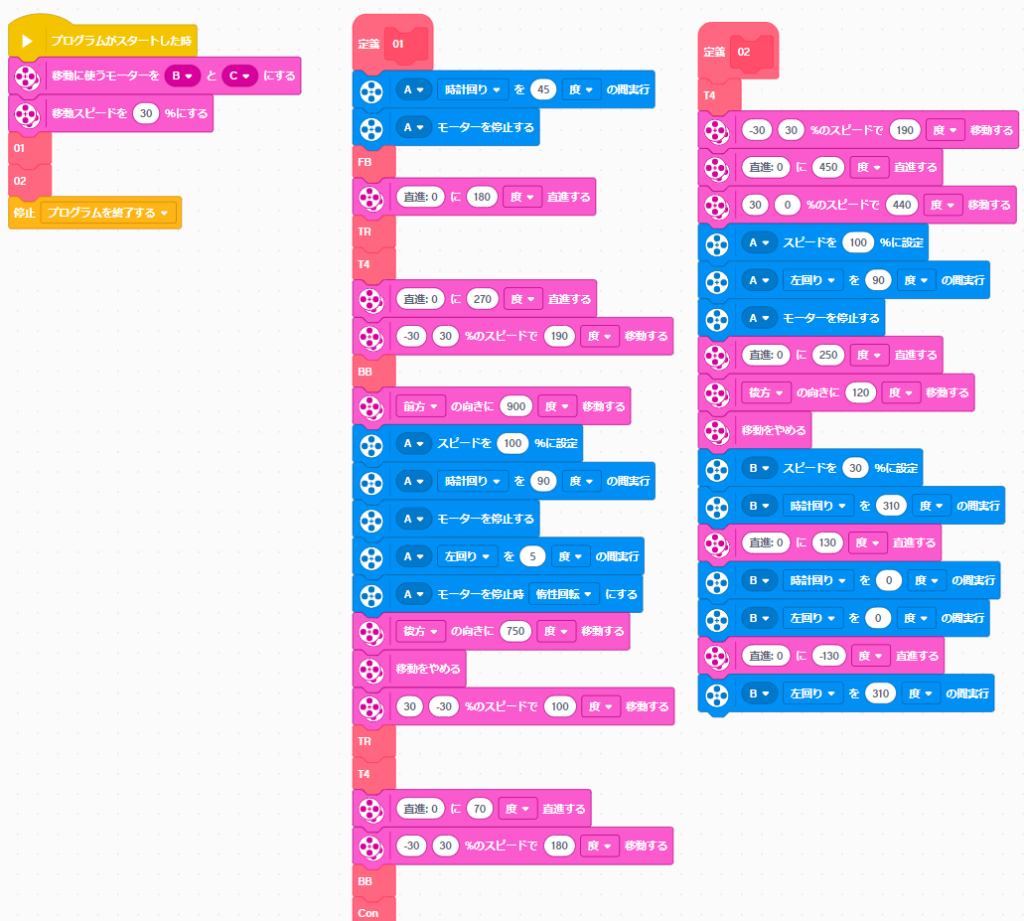
ここで「プログラムがスタートしたとき」の下にいくつかブロックが残っていることにご注意ください。走行に使用するモーターにどれとどれを使用するかなど、途中で変更しない設定は最初に書いたまま置いておく方が無難です。初期設定ですね。

これでこんな感じに練習できます。
マイブロックの「01」は2本目の十字路を1番の光センサーで発見して、100度直進したところまでが入っています。くれぐれも自分がどこまでをマイブロックに入れてまとめたのかをお忘れなく。
できた部分はまたマイブロックにして「02」にしておくとうっかり関係ない場所をいじってしまうこともなくて安心です。
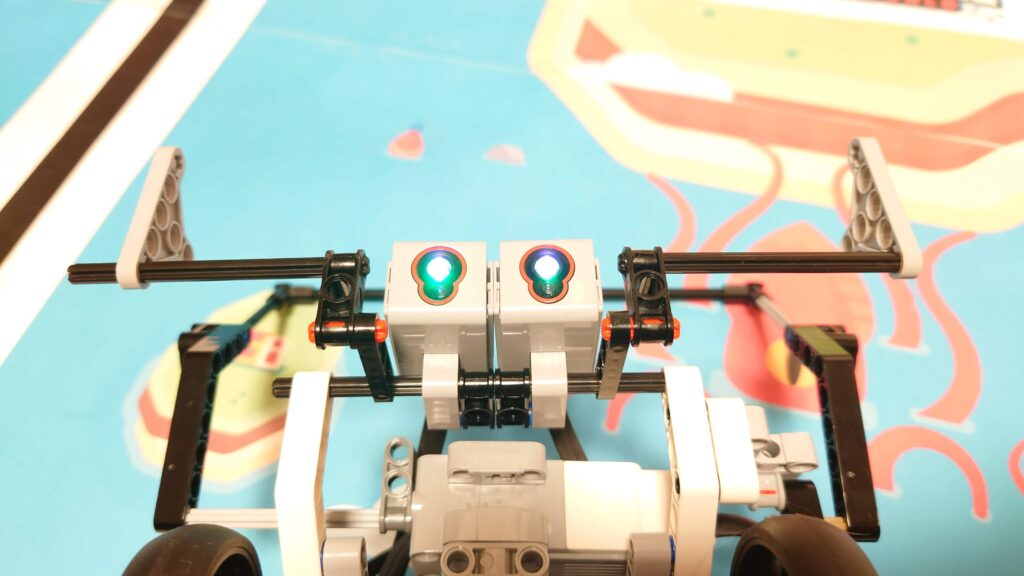
そうそう!廃棄物輸送用のアームを一部改修しました。
アームは長くてモーターから離れている方が使い勝手がいいようです。

今回もプログラムごと共有します。
2023EL-S01-02.lmsp
燃料回収→設置-374x249.jpg)