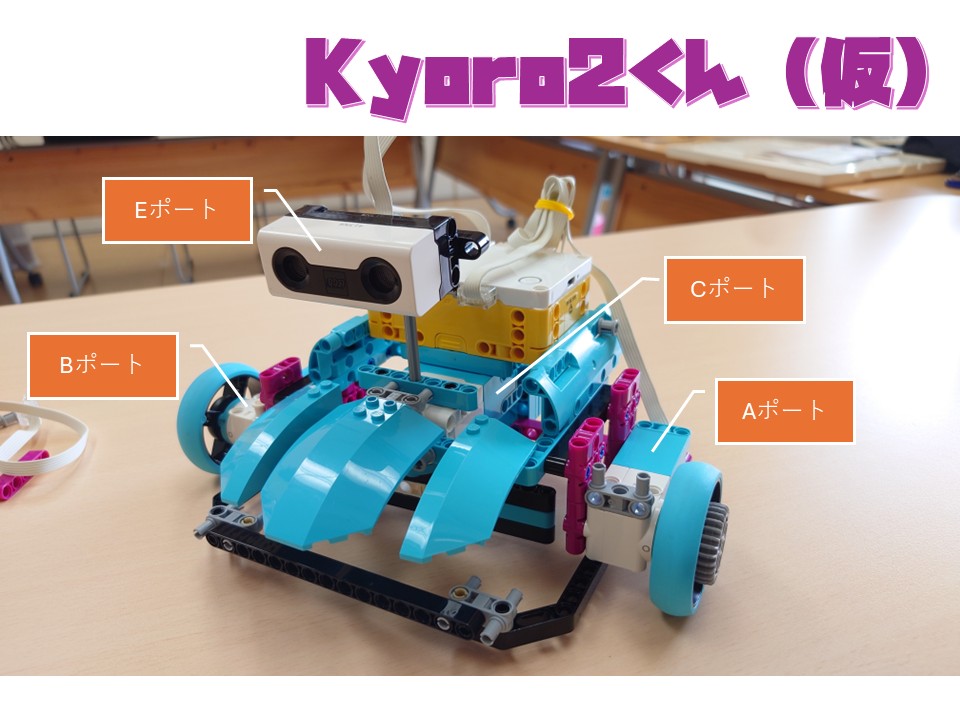
お掃除ロボットKyoro2くんのプログラムを紹介します。
SpikePrimeプログラムを起動すると「プログラムがスタートした時」が一つだけ配置された状態で始まります。プログラムが同時に2つ以上動くと、どちらが動いているのか分かりにくくなってしまうので、これまではお勧めしていませんでした。
今回、お掃除ロボットKyoro2くんをプログラミングするとき、超音波センサーで障害物がある方向を調べるための首振りと、前進・右旋回・左旋回するメイン動作の2つの全く異なる系統の動きを継続的に行わなければならなかったので、初めてスタートが2つあるプログラムを書いてみました。
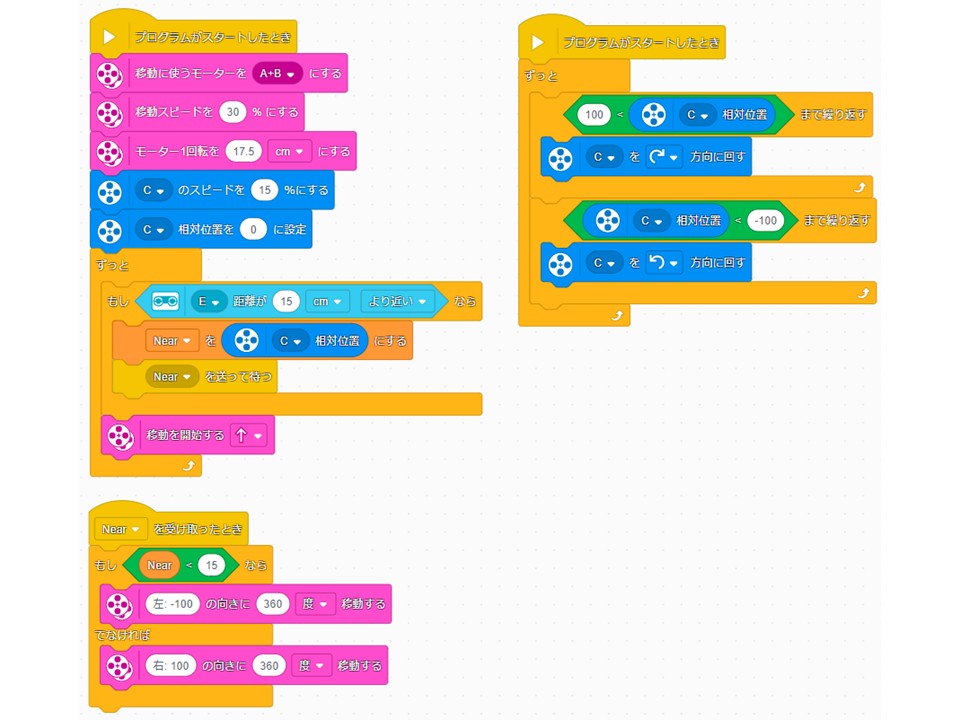
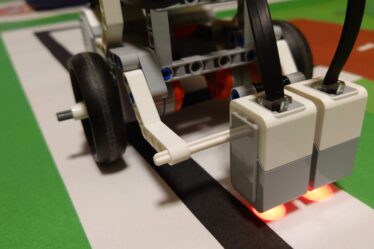
メインブロックでは、移動に使うモーター等の初期設定とEポートにつないだ超音波センサーが15cm以下を検知させるためのループを入れています。検知したら「Near」というメッセージを発信します。
「Near」を受け取ったら、そのときのCモーターの角度をもとに右に曲がるか、左に曲がるかを判断させています。