

本講習会を受講している中学生の塩谷和紀さんがプログラムの作例を書いてくれました。
以下で紹介します。
=====================
Pythonで制作した加減速とジャイロのプログラムをベースに、小学生の皆さんにも使いやすいspike3のワードブロックで加減速のプログラム、ジャイロのプログラムを作りました!ぜひ試してみてください。
〔加減速のプログラム〕
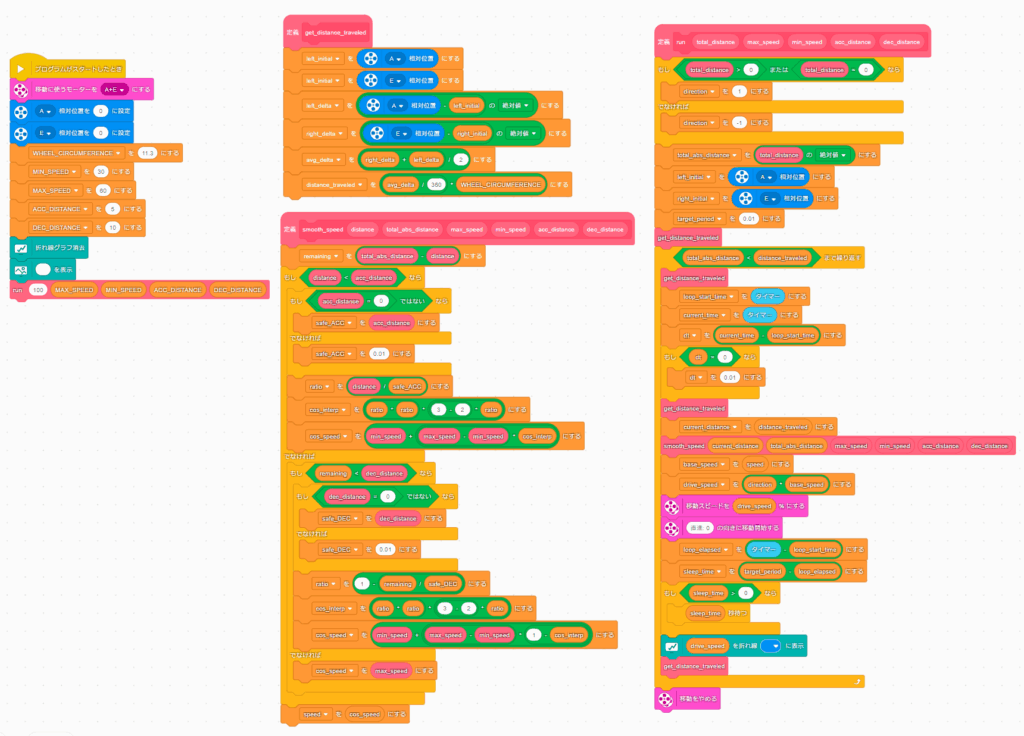
このプログラムは直進しながら加速し、じょじょに減速するというプログラムです。加減速することで、機体のブレが減り、安定した走行ができるようになります。
<使い方>
runというマイブロックがあり、その値を変えることで進みたい距離、加減速距離、最高スピード、最低スピードを変えることができます。
run(進みたい距離 ,最高速度 ,最低速度 ,加速距離 ,減速距離)
プログラムへのリンクです。
難しいけど研究してね!
https://drive.google.com/file/d/1alZShVMpU_nuAuJuOFREdFhZm6ChzMmw/view?usp=drive_link