

塩谷和紀くんの作例その2です。
〔ジャイロのプログラム〕
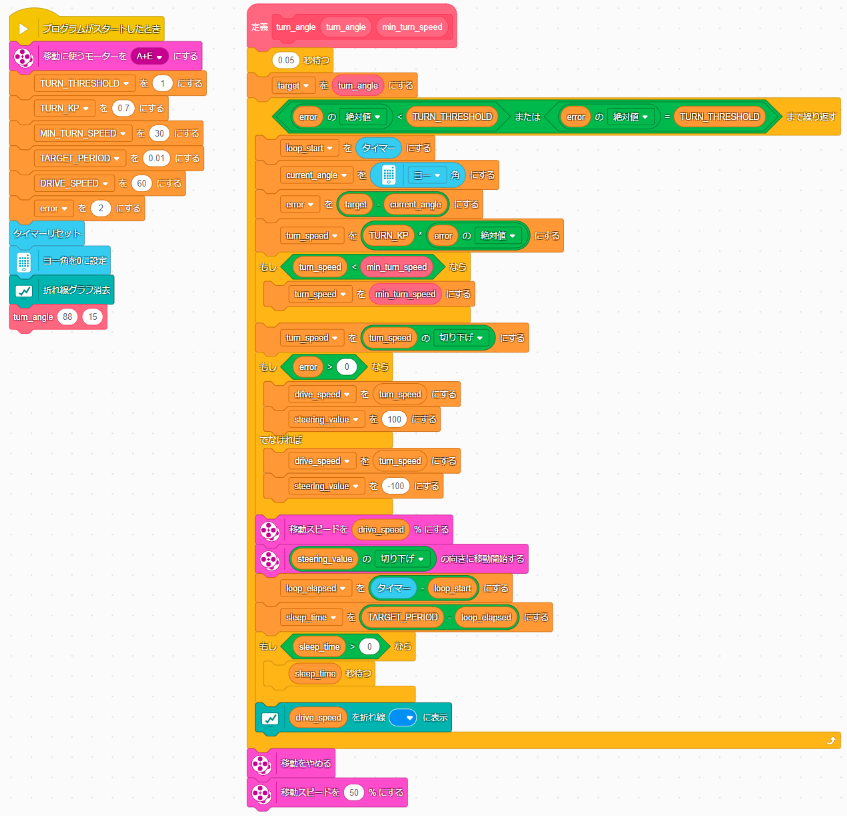
このプログラムはジャイロセンサーのヨー角を使って曲がり、かつ比例制御で減速しながら90度回転します。ジャイロセンサーを使って回転させることで、値を入れた場所に向けて、正確に回転することができるため、その後の動きのズレが少なくなります。
<使い方>
曲がりたい角度のヨー角の値を変えることで、回転の度数を変えることができます。
turn_angle(曲がりたい角度のヨー角の値 ,最低速度。
数値を色々変えてみて、試してみてください。
分からないことがあれば、何でも聞いてください。
絵だけじゃちんぷんかんぷんなので、GoogleDriveに上げたプログラムを貼っておきます。
https://drive.google.com/file/d/1x_mkyZgVfWviWMhMxcTlVx7ps0UGrjmy/view?usp=sharing